1 引言
随着国内演出市场需求的变化,各种流动演出和固定演出体量和规模逐渐增大,演出形式也日益丰富,因此,演出设备的种类不断变化,对演出设备的技术要求不断提升。以流动演出为例,之前几乎都是固定设备为主,一般采用固定桁架搭台,演出方式主要靠灯光音响来配合,但最近几年演出形式开始多样化,涌现出了很多新颖的机械设备,如增加舞台动感效果的柔索并联机器人、可编程矩阵球、机械臂、全向车台、拟态机器人、无人机等演出设备,极大地丰富了演出的形式和内容(见图1)。

在演出中,加入矩阵球表演方式的舞台,通过数量庞大的矩阵球的造型、色彩的变化,增加演出效果,有些矩阵球还可与演员互动做出特殊造型;柔索并联机器人,典型的为二维、三维威亚,可将人、摄像机、道具等在空中进行快速移动,配合表演定位;采用机械臂的方式可装载演出用的大型显示屏,也可将灯光进行托举,同时通过编程还能将人与机械臂进行互动,使演出模式更灵活,灯光的角度更加多样;采用全向车台则可以将道具或演员方便地移动到舞台的任意位置,使布景活起来,与演员的表演融为一体;拟态机器人则可通过单独表演或与演员配合的方式,形成单体或群体表演,丰富表演形式;无人机群则可以通过无人机构建大空间背景下的灯光造型展览展示,使表演立体化,扩展舞台空间。
下面针对上述几种用于舞台表演的机械设备的应用形态及实现功能展开阐释。
2 柔索并联机器人
2.1应用形态
柔索并联机器人是一类特殊的并联机器人,其末端动平台通过柔索与固定平台连接,根据各支链协调变化索长来实现其位置和姿态的改变。与传统机器人相比,其具有惯性小、响应快、高速性能好、工作空间大等一系列优点。
在演艺领域使用的柔索并联机器人主要为各种威亚,包括两轴驱动的双线飞行器,三轴四轴驱动的三维威亚,更多钢丝绳牵引驱动的多姿态移动平台,如图2所示。

舞台上常规出现的为一维威亚,也叫单点吊机,主要用于表演人员或者物体的上升下降,表演形式相对单一。
二维威亚则分为多种,有采用升降平移分离的轨道威亚、索道威亚,也有两台单点吊机末端互联形成的双线飞行器。双线飞行器相比轨道、索道威亚,不占用空间,可任意拆卸和任意组合,可控制人或道具在一个平面上进行表演,不仅可以进行上升下降的动作,还可以进行左右移动的操作。
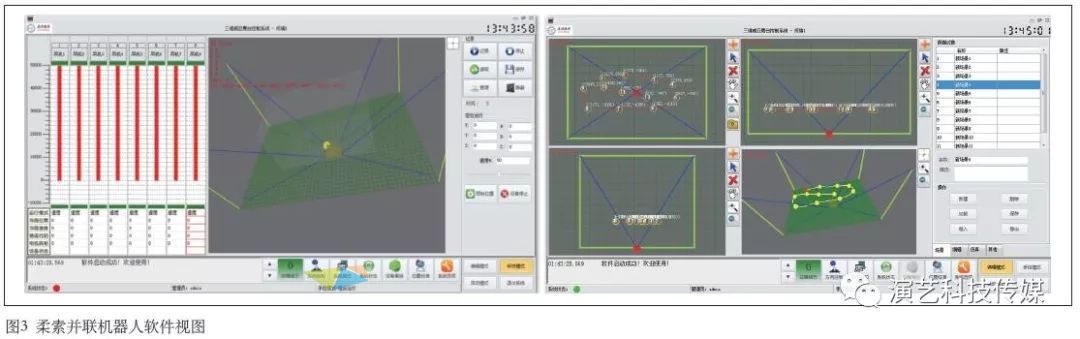
三维威亚通常采用四根绳索牵引,有X、Y、Z三个空间自由度,可以将演员或道具在三维空间中进行任意位置的移动,实现舞台立体空间的效果(见图3)。多姿态移动平台则通过6~8根钢丝绳牵引,除了可控制人或道具在空中的移动,还可控制物体的姿态,比如倾斜等动作。
双线飞行器相比轨道和索道威亚,组合灵活,方便拆卸,受现场空间环境影响较小,如目前在建的恒大海花岛项目观众厅就采用了十套双线飞行器,演员可通过飞行器从观众席后端飞向舞台。三维威亚目前应用场所较多,固定场所如银川演艺中心、道真演艺中心、哈尔滨万达、满秀等,流动舞台则比较常见,如大型体育场馆,各种演唱会,综艺节目都有使用。多姿态移动平台目前主要是一些展览展示在用,如2017年北京PALMEXPO(音响灯光展)上展出的八轴飞毯。
2.2技术要点
在演艺领域的应用中,柔索并联机器人一般需满足如下技术功能。
轨迹离线编程。编辑轨迹,设定需要经过的轨迹点,并通过轨迹自动平滑等技术处理设定好的运行轨迹;同时,还可设定轨迹的运行时间等,以及轨迹运行其他参数的设定和自检;支持轨迹离线仿真。
示教功能。能将手动运行的轨迹进行记录,并回放;可通过手柄先试运行轨迹,同时开启轨迹记录功能,记录完成后可将轨迹进行完整的重现。
运行区域设定。可手动设置运行区域, 保证系统在运行过程中不会运行过界和碰撞。
为了实现上述功能,系统一般需要采用多种算法,如基于样条曲线的轨迹生成算法,基于S曲线的加减速控制算法,基于轨迹球控制的三维视图控制算法等。
3 全向车台
3.1应用形态
全向车台也称万向车台,通过规划路径,可完成车台的全方向移动及中央转台旋转运动,用于实现切换布景和迁移演员。
在演出应用中,按照演艺节目编排要求编程控制车台的行走路径,车台搭载演员或布景进行上场或退场、在指定时间和位置表演旋转等动作,极大地丰富了艺术表演的形式。另外,它的真实研究价值不仅仅体现在演艺场所的艺术表演上,其蕴含的全轮驱动结构、导航定位技术完全可以应用到车间、码头、船舰上的物流传输系统,在工业实际应用中有着巨大的市场潜力。
需要说明的是,在平昌冬奥会闭幕式上应用的全向车台(见图4),被很多人误认为是智能机器人。其实,全向车台与目前的智能机器人有所区别,全向车台更强调预编程行为,严格按照编辑好的动作进行表演,一般无法进行自动轨迹规划等行为。

3.2技术要点
相比用于物流的全向移动平台,用于演出的全向车台主要有如下技术需要解决。
轨迹规划不同。不同于工厂制造环境,演出机器人的最大难题,来自于运动姿态的多样性,以及需要保证与演员表演、演出音乐、地面投影、场地灯光等的高度统一。传统上工厂用的全向车台(移动机器人)侧重于效率、精度和速度,这也直接决定了机器人的运转路径多以直线、圆弧为主,机器人的加减速度规划曲线呈现一个规则的梯形。而用于演出领域的全向车台(表演机器人)为了完成完整的舞美创意,仅靠直线和圆弧转弯的动作是远远不够的,需要像芭蕾舞演员在旋转的同时,还可画出优美的弧形;同时,还需要多台表演机器人协调运转。
适应环境复杂。由于演出过程中,有时候需要人员与车台进行互动,一般对于采用激光导航的车台而言,遮挡比较严重,同时光干扰也较大,需解决导航环境不理想情况下的定位,比如惯性导航等。
多车台拼接。演出过程中有时需要运送比较大的道具,需要车台对接并完全同步运行。
全向车台在演艺领域中的应用,一般需满足如下技术功能。
轨迹离线编程。编辑轨迹,设定需要经过的轨迹点,并通过轨迹自动平滑等技术处理设定好的运行轨迹;同时,还可设定轨迹的运行时间等,以及轨迹运行其他参数的设定和自检;支持轨迹离线仿真。
避障功能。一般通过内置激光避障和红外等传感器,并结合算法实现避障功能。
运行区域设定。可手动设置运行区域, 保证系统在运行过程中不会运行过界和碰撞。
全向车台的上述技术特征均有别于传统剧场设备,某些编程手段与柔索并联机器人类似,也是机器人编程的一个分支,和物流机器人又有所不同,不需要自动规划路径,需要严格按照编好的路径进行移动。
4 矩阵球
4.1应用形态
矩阵球,也称动态雕塑、悬浮球阵列,是由数百到数千个悬浮体组成的阵列,每个悬浮体通过一根拉线受控,可做垂直运动,每个悬浮体的运动组成一体化的动作。
动态雕塑在计算机的控制下,以立体方式展现图案、文字、变换的曲线曲面,伴随音乐舞动,亦或灵动,亦或柔美,带给观众极强的视觉冲击感,具有超乎想像的展示效果,在科技馆、展厅、大型商场、舞台等演艺娱乐场合迅速地应用,图5所示为动态雕塑在舞台上的应用场景。

4.2技术要点
为了实现系统的高动态特性和易操作特性,系统采用伺服+高速工业以太网的方案来实现,动态雕塑由一个个一体化悬浮体组成,运用分布式实时控制、伺服控制等技术。每个悬浮体安装简单,通过标准化的紧固件固定在吊顶钢架上;电气部分只需要多芯插座连接,一般的工人即可以完成安装;整体采用无机柜无机房设计,简化运维成本,用户通过计算机软件可以灵活地控制悬浮阵列的场景变换。
目前动态雕塑的实现主要有两种技术方式。
一般应用于高速高精度场合,系统运行结构采用伺服电机,每个伺服电机间通过高速工业以太网来布置控制网络,每个运动部件的速度可达到几米每秒的运行速度。系统针对雕塑的编程采用专业的编程软件来实现,编程方式相对灵活多样。
一般应用于要求相对较低的场合,方案采用DMX512信号来控制每个点,电机一般采用步进电机,软件编程通常采用现成的灯光控制台进行编程,运行速度较慢,编程较为繁琐。
软件(见图6)一般应具备如下的功能。
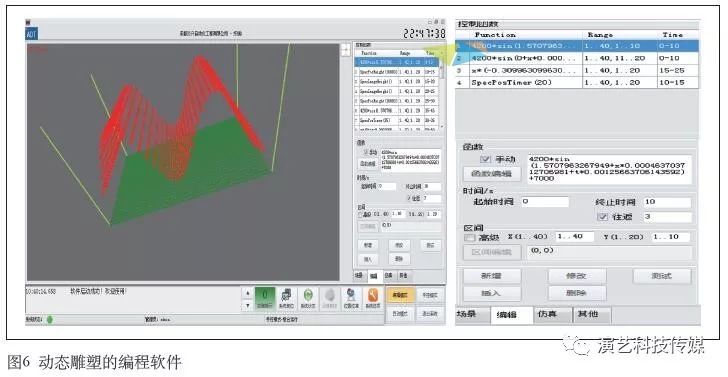
固定模型编辑:可编辑某个区域的动态雕塑按照设定好的数学函数进行运行,如正弦余弦、直线、斜面等固定的模型。
字符编辑:可将动态雕塑用于显示字符,如数字、汉字、英文字母等。
图形编辑:可将动态雕塑显示固定的画面。软件可对图形进行预处理,包括调整灰度值等处理功能。
自定义函数编辑:可用于任意函数编辑,用于显示用户指定的特殊函数,如特定的曲面曲线等信息。
5 机械臂
5.1应用形态
对于演艺行业来说,机械臂诚然是玩转舞台的点睛之笔。尤其是随着技术的不断更新,机械臂已然全面进入演艺领域,LED显示屏可以在机械臂的掌控下随意飞行、拼接、拆分、旋转,在舞台空间形成各种造型的LED背景显示。机械臂也可与多媒体、灯光、音乐“共舞”。
与目前常规的舞台机械相比较,机械臂有体积大、自由度多、惯量大、速度快、精度高、安全性和可靠性要求高等特点。多数厂家采用购买现成的工业机器人来完成,比如“珠江红船”上的演出采用的是传统常规的机器人(见图7),借此加入很多表演元素,采用人与机械臂互动的方式来增加表演效果。但也存在特殊情况,如传统常规的机器人由于载荷、形状等无法满足演出要求,需特别定制开发,如武汉“汉秀”采用的机器人(见图8)。

5.2技术要点
由于工业机器人产业已经发展多年,机械臂相对成熟度较高,已经应用于工业场合多年,有丰富的应用经验。基于机械臂的机器人多数采用现有的软硬件来完成,比如采用机器人的示教功能,将动作进行示教规划,使得机械臂能按导演要求进行动作重现;也可通过机器人控制接口,发送目标点给机器人,通过额外的人机交互功能来完成指令的下发和执行。目前,也有很成熟的编程功能满足使用需求,应用时一般需要了解机器人自带的功能即可;也可使用第三方编程软件,如RobotMaster,RobotArt,RobotWorks等软件,按照演出需求进行预编程,并可实现离线编程。
6 拟态机器人
6.1应用形态
目前,拟态机器人被运用到舞台表演主要是作为伴舞,表演的形式通常是几十台机器人组成方阵随着背景音乐或歌手的演唱翩翩起舞,加之机器人身上LED灯的七彩变幻,达到一种科技与律动结合的效果。拟态机器人本身的科技含量其实并不高,是通过所谓“舵机”(一种廉价小型伺服电机)来控制各个关节,先根据舞美的要求预先设定好舞蹈程序,每个舵机按时间顺序向不同的角度移动,从而有了跟着音乐的舞步。
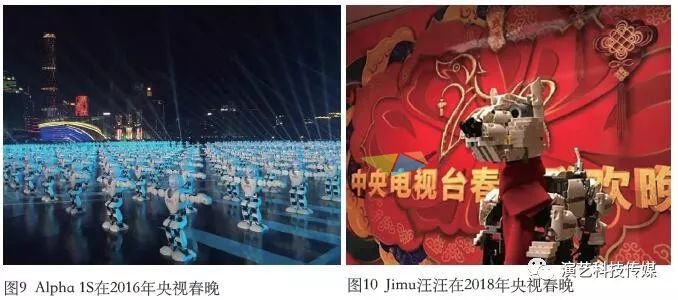
整个舞蹈程序以无线触发方式启动,这样所有拟态机器人可以在同一时刻启动整个舞蹈程序。虽然拟态机器人本身技术难度不大,但是要使数量如此之多的机器人同时按一个既定的程序动起来,并且运行稳定不出错,也不是一件容易的事,这里面需要花大量时间对机器人进行调试。Alpha 1S在2016年央视春晚首次亮相便大获成功(见图9),它拥有16个关节自由度,可模仿人的肢体动作,双眼装有蓝光LED,按程序指令闪烁。2018年央视春晚主会场的大开场节目中,拟态狗的特别版机器人“Jimu汪汪”惊艳亮相(见图10),不仅与舞台上的演员精彩联动,还被分别摆放在台下的24个圆桌上与现场观众进行互动,成为一大亮点。
6.2 技术要点
拟态机器人用于演艺领域中,往往是群体应用,在调试好每个单个拟态机器人的动作、姿态、位置后,还要考虑群体的同步性和一致性,这对于信号的传输距离、抗干扰能力及机器人接收信号的灵敏度都会有一定的要求。
拟态机器人作为新兴的机器人分支,每个厂家都有自己的编程软件,有些机器人本身就支持二次编程功能,用户可以自行编辑程序,而无需具备系统专业的编程知识;也可通过第三方的软件编出复杂的动作。从技术应用层面而言难度相对较低。
7 无人机
7.1应用形态
对于大多数的中国观众来说,在电视上看到无人机进行艺术表演,应该是在2016年央视春节联欢晚会。此后的2017年央视春晚、2018年央视春晚,无人机表演成了不可或缺的亮点。几十架无人机就像萤火虫一般,虽然每一个无人机只有点点微光,但是汇集在一起之后,就能组成如梦境般的画面。又如2018年2月的平昌冬奥会,几百架无人机在空中组成了奥运五环,体现了新时代的新技术与奥林匹克这一古老盛会的完美融合(见图11)。

7.2技术要点
对于无人机本身的技术分析,不是本文的描述重点。把无人机运用到演艺创作中,真正的技术难度说到底还是移动机器人的问题,与全向车台面对的难点类似。但是无人机更多的时候是在三维空间中的飞行造型,所以面对的问题特别是定位更加复杂。概括起来,无人机编组控制有如下难点。
时钟问题,是指如何为多架无人机进行时钟同步或如何使多架无人机的系统时间一致。这个问题是演艺设备行业的一个普遍难题,当一个系统内设备数量多了之后,如何保证每个系统或子系统内各个设备的时钟一致。不同的授时方案决定了不同的时间扫描周期,例如GPS可以小于1 ms,电波授时在1 ms左右,NTP网络授时在50 ms左右。
定位问题,包括空间定位和定位精度,是指如何测量多架无人机的位置及获取每架无人机位置的准确程度。常用的方案有光学动(亚毫米级精度)、光流定位(毫米级精度)、UWB定位(厘米级精度)、RTKGPS定位(分米级精度)、GPS定位(米级精度)等。
导航问题,是指导引和控制无人机按舞美要求飞行在预定轨道的技术和方法。制导过程中,导航系统要在系统时间周期内不断扫描更新无人机与预定轨道的相对位置关系,发出导航信息给无人机控制系统,对飞行轨迹和每个无人机的姿态做闭环控制。
路径规划,是指按照舞美要求设置预定轨道的过程与方法,分为人工规划或自动规划。一般不超过100架无人机的规模可以采用人工规划,而当飞行器数量大于此值后,自动规划则成为超大规模编队的必要核心技术,通常采用的方法有基于网格地图的搜索算法、人工势场法、或蚁群算法等特殊的路径优化方法。
8 结语
目前,舞台演出形式越来越多样化,不断地引入了其他行业的技术成果,形成舞台上融合演出模式,以满足各种创意需求,如迪斯尼宝藏湾就将大型的风洞引入了表演中,配合演出达到悬空的效果;再如张艺谋2047中表演的云纱秀,就是将空气动力学融入到舞台中进行表演。典型演出设备与新技术手段的应用丰富了舞台表演形式,将带给观众更多震撼的视听感受。
选自《演艺科技》2018年第4期 侯鹏强《丰富舞台表演形式的典型设备与应用》,转载请标注:演艺科技传媒。更多详细内容请参阅《演艺科技》。